1. Diverse Behavior Learning
Challenge: Generating the same trajectory distribution $p_{\mathcal{M},\mu}(\tau)$ as in a dataset $\mathcal{D}_e$ generated by the experts $\Pi_e = \{\pi_e^{(1)}, \pi_e^{(2)}, \ldots, \pi_e^{(k)}\}$ with $1\le k \le |\mathcal{D}_e|$ in a fully offline manner.
Limits: Traditional imitation learning such as Behavior Cloning (BC) fails when $k>1$ because it captures only transition‑level diversity.
Question: How to learn from $\mathcal{D}_e$ a policy $\pi$ capable of:
- • Diversity: Reconstructing the trajectory distribution?
- • Controllability: Being prompted to generate specific behaviors?
- • Robustness: Displaying robustness to compounding errors and environment stochasticity?
2. ZBC: Stylized BC
ZBC addresses Diversity & Controllability by minimising
and reconstructing
$$ p_{\mathcal{M},\pi_{\theta}}^{ZBC}(\tau)=\frac{1}{|\mathcal{D}_e|}\sum_{\textcolor{blue}{i}=0}^{|\mathcal{D}_e|-1}p_{\mathcal{M},\pi_{\theta}(\cdot\mid\cdot,\textcolor{blue}{z_i})}(\tau). $$Yet compounding errors and environment stochasticity can create OOD $(s,z)$ pairs, and ZBC tends to over‑fit.
3. WZBC: Weighted Stylized BC
WZBC achieves Diversity, Controllability and Robustness with
where the style–distance $\nu$ is
$$ \forall (\textcolor{blue}{\tau_i},\textcolor{red}{\tau_j})\in \mathcal{D}_e:\;\;\nu(\textcolor{blue}{\tau_i},\textcolor{red}{\tau_j}) = \frac{\left\|\operatorname{pad}(\textcolor{blue}{\tau_i^s})\!-\!\operatorname{pad}(\textcolor{red}{\tau_j^s})\right\|}{\displaystyle\max_{\textcolor{green}{\tau_k}\in \mathcal{D}_e}\left\|\operatorname{pad}(\textcolor{blue}{\tau_i^s})\!-\!\operatorname{pad}(\textcolor{green}{\tau_k^s})\right\|}. $$4. Environments & Datasets
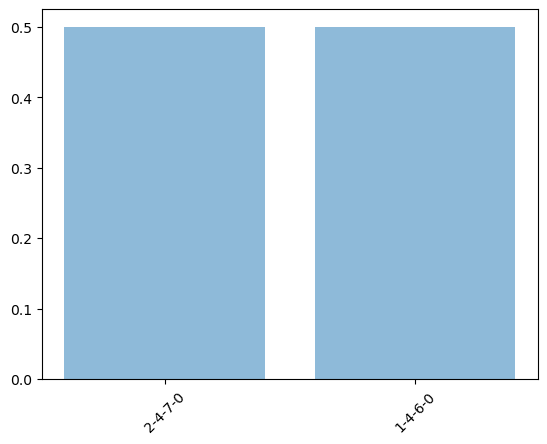
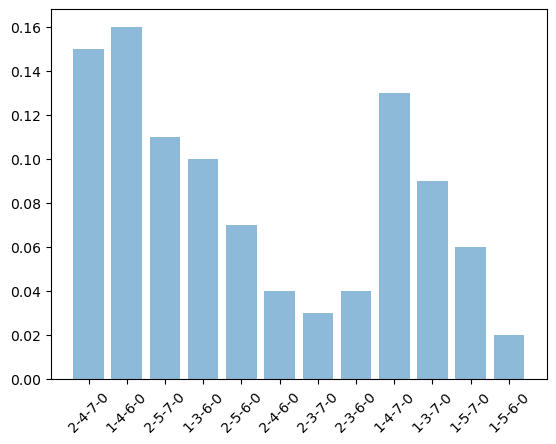
Maze2D (One‑side k=2, Only‑forward k=12)


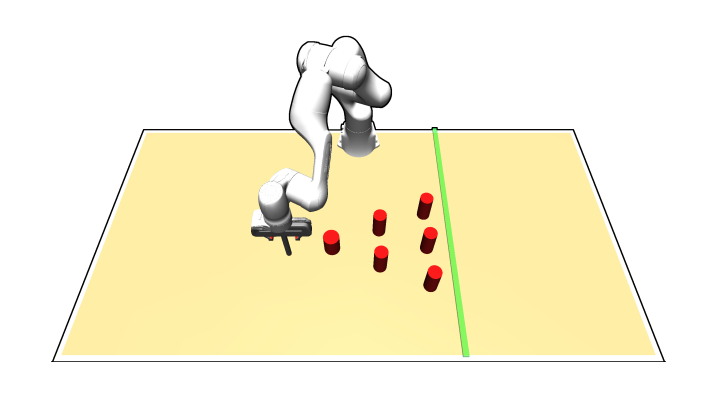
D3IL (Avoiding k=24, Aligning k=2)
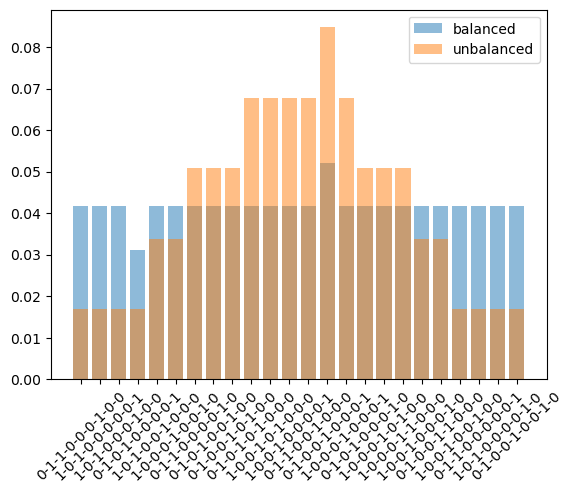
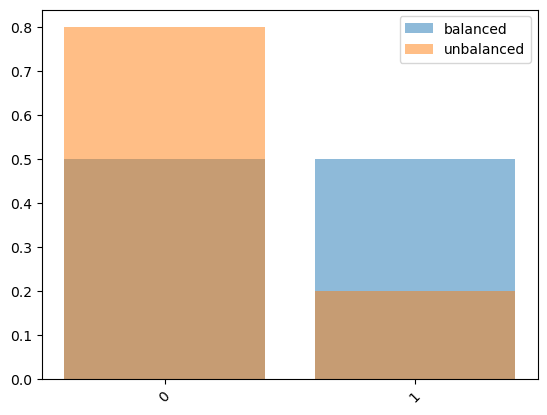
With the balanced datasets from D3IL and unbalanced datasets from their filtered versions.
5. Diversity Results
Evaluating ZBC and WZBC diversity capture. ZBC generates behaviour histograms with the lowest L1-distance to $\mathcal{D}_e$, yet attains lower performance in more complex settings. WZBC is slightly less precise but succeeds more often.
| Dataset (distance) | BC | ZBC | WZBC | BESO | DDPM‑ACT | DDPM‑GPT |
|---|---|---|---|---|---|---|
| medium_maze-only_forward | 1.74 ± 0.054 | 0.256 ± 0.023 | 0.248 ± 0.047 | 0.744 ± 0.041 | 0.916 ± 0.252 | 0.604 ± 0.082 |
| medium_maze-one_side | 1.4 ± 0.49 | 0.044 ± 0.032 | 0.06 ± 0.033 | 0.140 ± 0.049 | 0.640 ± 0.390 | 0.100 ± 0.075 |
| d3il_avoiding | 1.917 ± 0.0 | 0.265 ± 0.0 | 0.482 ± 0.026 | 0.901 ± 0.091 | 0.781 ± 0.184 | 0.531 ± 0.093 |
| d3il_unbalanced_avoiding | 1.925 ± 0.062 | 0.102 ± 0.116 | 1.457 ± 0.087 | 1.283 ± 0.067 | 1.342 ± 0.134 | 1.26 ± 0.022 |
| d3il_aligning | 1.0 ± 0.0 | 0.172 ± 0.17 | 0.552 ± 0.224 | 0.472 ± 0.111 | 0.488 ± 0.075 | 0.296 ± 0.104 |
| d3il_unbalanced_aligning | 0.4 ± 0.0 | 0.172 ± 0.057 | 0.364 ± 0.037 | 0.256 ± 0.066 | 0.212 ± 0.053 | 0.288 ± 0.063 |
| Dataset (success rate) | BC | ZBC | WZBC | BESO | DDPM‑ACT | DDPM‑GPT |
|---|---|---|---|---|---|---|
| medium_maze-only_forward | 1.0 ± 0.0 | 1.0 ± 0.0 | 0.99 ± 0.0 | 0.998 ± 0.004 | 0.9 ± 0.12 | 1.0 ± 0.0 |
| medium_maze-one_side | 0.6 ± 0.49 | 1.0 ± 0.0 | 1.0 ± 0.0 | 1.0 ± 0.0 | 0.994 ± 0.012 | 1.0 ± 0.0 |
| d3il_avoiding | 1.0 ± 0.0 | 0.996 ± 0.005 | 0.954 ± 0.024 | 0.998 ± 0.008 | 0.904 ± 0.08 | 0.986 ± 0.006 |
| d3il_unbalanced_avoiding | 0.6 ± 0.49 | 0.75 ± 0.092 | 0.802 ± 0.113 | 1.0 ± 0.0 | 0.996 ± 0.005 | 0.999 ± 0.0 |
| d3il_aligning | 0.21 ± 0.395 | 0.52 ± 0.432 | 0.806 ± 0.105 | 0.910 ± 0.12 | 0.872 ± 0.047 | 0.852 ± 0.055 |
| d3il_unbalanced_aligning | 1.0 ± 0.0 | 0.328 ± 0.054 | 0.762 ± 0.126 | 0.922 ± 0.013 | 0.882 ± 0.038 | 0.844 ± 0.015 |
6. Controllable Generation
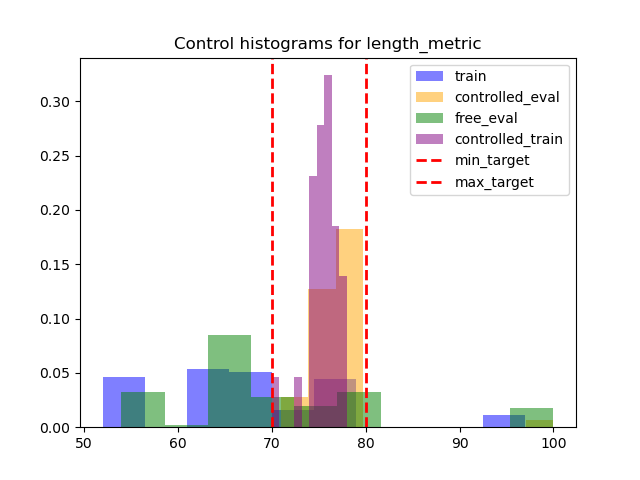
length_metric
For control we :
- Select trajectory styles in $\mathcal{D}_e$ that satisfy a property $\Psi(\tau)$ with $\Psi(\tau)=\bigl(\text{length}(\tau)\!\in[70,80]\bigr)$.
- Generate adequate trajectories by conditioning $\pi$ on the selected styles.
7. Robustness to Stochasticity
Evaluating ZBC and WZBC under stochastic dynamics. WZBC generally surpasses ZBC in both L1-distance and success rate as uncertainty increases.
| Configuration | L1 Distance | Success Rate | ||
|---|---|---|---|---|
| ZBC | WZBC | ZBC | WZBC | |
| medium_maze-only-forward (determinist) | 0.256 ± 0.023 | 0.248 ± 0.047 | 1.0 ± 0.0 | 0.99 ± 0.0 |
| medium_maze-only-forward (pseudo-r-init) | 1.152 ± 0.094 | 0.828 ± 0.349 | 0.448 ± 0.031 | 0.684 ± 0.152 |
| medium_maze-only-forward (r-init) | 1.556 ± 0.079 | 1.552 ± 0.037 | 0.858 ± 0.046 | 0.978 ± 0.019 |
| medium_maze-only-forward (noise-transi) | 0.729 ± 0.134 | 0.744 ± 0.029 | 0.632 ± 0.066 | 0.744 ± 0.038 |
8. Conclusion
ZBC learns a style‑conditioned policy enabling trajectory diversity capture and controllable generation in a fully unsupervised offline setting. WZBC bridges BC and ZBC by mixing styles to enhance robustness.
Limits: Using simple Euclidean distance is not scalable to all observation modalities; performance can degrade in highly complex environments.
Future work: Incorporating IRL techniques for richer observation spaces and leveraging RL signals to improve task performance.